Modernisation of a collaboration tool suite for an automotive manufacturer

Methods from the field of artificial intelligence at a glance: Graph-SLAM, combinatorial optimization, clustering, probabilistic modeling
Used technologies at a glance: Java, g2o (General Graph Optimization Library), Apache Accumulo, JavaScript, Google Maps
Timeframe of the project: 04/2016 to 03/2018
Involved project roles: AI Research Scientists
As a service provider for individual software solutions, jambit has been accompanying developments in the field of artificial intelligence, especially in the area of geoanalytics and digital maps, for many years. As early as 2015, jambit began analyzing vehicle data for BMW – with reference to location, comparing it against existing maps, and using models to gain new insights into the road network. This data can be used in the future for updated digital maps.
Current map material is becoming increasingly important as driving becomes more digitized. In autonomous driving from level 3, highly automated driving, vehicles already drive autonomously, relying not only on their sensors but also on highly accurate maps. Up-to-date maps are therefore a prerequisite for the approval of routes for highly automated and autonomous driving. Those vehicle manufacturers that can provide their vehicles with more up-to-date maps are therefore also in a position to offer highly automated driving functions over a wider area. This can represent a direct competitive advantage.
Commercial map providers survey the road network with special measuring vehicles. However, it is not practicable to use such vehicles permanently throughout the country, which is why road maps are already out of date on the day they are published. BMW's current vehicle models, already use cameras and corresponding image-processing components to perceive road markings and boundaries, road signs and posts, for example. They also have GPS sensors and odometry or dynamics data for absolute or relative localization. Therefore, we asked ourselves during the research project how to use the data of these series-produced vehicles for mapping.
The quality of individual measurements is different for a production vehicle than for a highly specialized measurement vehicle, and all measurements are subject to certain measuring errors. In addition, each vehicle's view of its current environment is usually incomplete because its viewing angle is limited and other vehicles may obscure its view. With inaccurate self-localization mechanisms and inaccurate measurements of the positions of objects relative to the vehicle, it is also no longer clear whether any two measurements refer to the same or different objects (data association problem). A priori, we also do not even know which objects exist at all and should therefore be mapped.
Our jambit team faced these challenges in the HAD Learning Map project, in particular to map lane courses and lane boundary lines as well as signs and posts. By using the data of many vehicles that passed the same road section, the above problems can be solved – using methods of artificial intelligence and machine learning.
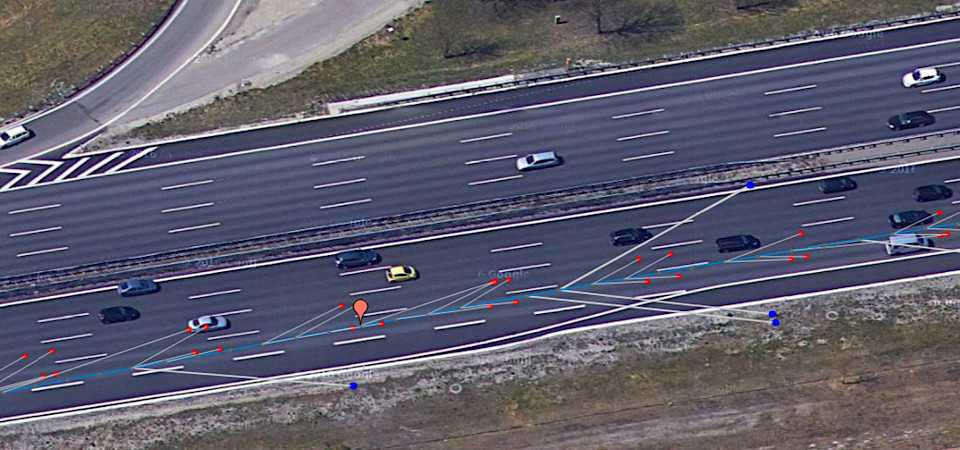
Graph-SLAM was used as a method for consolidating imprecise sensor data. SLAM (simultaneous localization and mapping) is a well-known approach from robotics. In the graph-based case, the mapping problem is reduced to a probabilistic reasoning problem in a factor graph, for which all sensor perceptions must be suitably probabilistically modeled. However, before even formulating a graph-SLAM problem, which can be later solved, the data association problem must be solved first. jambit developed a multi-step process for this purpose, which builds up the graph-SLAM problem incrementally: Insights from previous optimization steps are used to detect new objects to be mapped and to assign the correct sensor perceptions to them. In particular, for lane mapping, it was necessary to solve a hard combinatorial optimization problem, since neither the number of lanes nor changes in lane configuration over the course of the track to be mapped were known beforehand.
jambit was responsible for the conception, development, validation and scientific documentation of all algorithms in the project. Details about the developed method can be read in our contribution to the IEEE Intelligent Vehicles Symposium 2019.

Click here to download the jambit Innovation Story "Highly Automated Driving (HAD) Learning Map"
How we develop AI solutions together with our customers
Our services in artificial intelligence and data science

Article in Big Data Insider: SLAM
If you have any questions, please do not hesitate to contact Frank Strobl, Head of Competence Center Business Development. Just leave him a message via the contact form.

Contact us now


